
 来源:鼎纪电子PCB 发布日期
2017-04-18 浏览:
来源:鼎纪电子PCB 发布日期
2017-04-18 浏览: 2.2 助力特性曲线设计
EPS助力特性是驾驶员输入转矩和电机助力力矩(助力电流)之间的关系。汽车在行驶过程中,转向阻力随着车速的增加而降低。为了获得汽车低速行驶时 转向的轻便性和高速行驶时的稳定性,在同种行驶状况下,电机助力力矩随着车速的升高而减小,并在车速超出一定范围时,电机不进行助力。常见的助力特性曲线 有3种:直线型、折线型和曲线型。直线型助力特性曲线形式简单,实际中容易调节和实现。因此,文中采用直线型助力特性进行控制器设计。
2.3 控制算法
EPS系统控制是对电机电流大小和方向的控制。其控制算法的好坏直接影响着转向系统的性能。本文采用目前广泛应用于工业控制领域的PID控制算法。 PID控制稳定性和可靠性高、实时性强、且控制与调试方法简单,易于实现,适合用于汽车电动助力转向系统的控制。因此,PID控制是现阶段EPS控制系统 主要的控制策略。
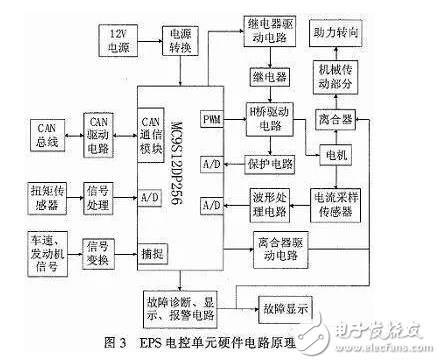
3、硬件设计
3.1 总体设计
单片机是控制器的核心,其选型需要考虑适用性、可靠性、片内资源、价格等多种因素。单片机选型恰当与否直接影响机构控制系统的性能及设计难易程度 度。本设计采用Freescale公司的16位高精度MC9S12DP256单片机。MC9S12DP256内置5个CAN模块、2个8通道10位A/D 转换模块、8个PWM通道,总线速度25 MHz,采用5 V供电,112脚LQFP封装。此单片机,内部资源丰富,可大大简化控制系统硬件电路,其可靠性高,非常适用于EPS控制。设计中没有用到的管脚引到电路 板上,以便于后续开发。
硬件设计如图3所示。车速、发动机、转矩信号经处理后送给MC9S12DP256单片机,经单片机计算后,得到电机助力电流值,经驱动电路后作用于 助力电机,控制电机输出力矩的大小和方向,同时对电机电流进行采样,并送回单片机,形成闭环控制。在助力控制基础上,设计了电机保护电路和故障诊断与提示 电路。一旦检测到故障存在,立即断开离合器,改用纯手动转向,并发出故障信号,从而保证了行车安全。
3.2 控制系统硬件电路设计
硬件电路设计主要包括电源转换电路、扭矩信号处理电路、车速信号处理电路、CAN通信电路、时钟电路。具体设计如下:
电源转换由于单片机工作时管脚电压为+5 V供电,而车载电源电压为+12 V。因此,需要对+12 V电压进行转换,变成+5 V。本设计中采用7805电压转换芯片进行电压变换。
扭矩信号处理由于扭转传感器获得的是一些微弱的小信号,容易受干扰,因此需要对其进行滤波处理。本设计采用型滤波电路,R12取大电阻,提高输入阻抗。
车速处理电路车速信号为+12 V单极性方波,电压太高,不能直接用于单片机,需要将其变换为+5 V以内的方波。利用LM358对其进行处理,经转换后得到高电平为3.72 V,低电平为0.01V的方波信号。
CAN总线驱动电路MC9S12DP256内部集成了CAN总线控制器,CAN驱动电路只需要物理层驱动即可。本设计选用82C250芯片进行设计。
时钟电路时钟是单片机工作的基础。MC9S12DP256单片机内部集成了压控振荡器,可在其43、44和46、47引脚分别接上锁相环电路和16MHz的晶振电路。组成MC9S12DP256时钟电路,提供25MHz的时钟信号。
【本文标签】: 多层 pcb 多层PCB面板 公司设备 沉金板
【责任编辑】:鼎纪电子PCB 版权所有:http://www.dj-pcb.com/转载请注明出处
 扫一扫更精彩!
扫一扫更精彩!